pravmash › Форумы › Основная статья › Механизмы линейного перемещения
В этой теме 65 ответов, 7 участников, последнее обновление Д.Д. 2 года/лет, 3 мес. назад.
-
АвторСообщения
-
15.09.2019 в 21:34 #4196
Даниил Павлович, как сейчас говорят, «вы меня покусали». Теперь я везде ищу избыточные связи. Нарвался недавно на автомобильные механизмы дисковых тормозов, а там одна из основных проблем — заклинивание подвижного суппорта на двух направляющих круглого сечения (пальцах). Опять они, проклятые избыточные связи. Да и чтобы колодки самоустанавливались и равномерно прижимались к диску, несмотря на неровности, нужны шаровые пары вместо плоских. Неравномерный износ колодок и дисков — постоянная проблема данных тормозов.
16.09.2019 в 18:29 #4198Не обращал особого внимания на дисковые тормозные механизмы. Беглый просмотр картинок в сети показал их большое разнообразие. Есть механизмы с явным наличием избыточных связей (Рис. 1). Но, видимо, есть и конструкции, в которых таких связей нет или их число сведено к минимуму. Возможно, такая конструкция показана на рис. 2. Чтобы судить определенно, нужно иметь полноценные сборочные чертежи.

Рис. Тормоз с явными избыточными связями
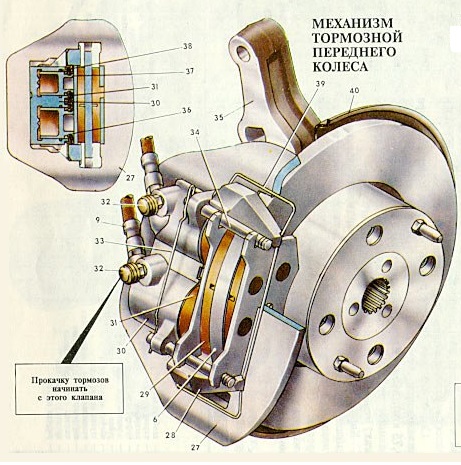
Рис. 2. Тормоз, в котором, возможно, избыточных связей нет на уровне узла крепления суппорта или их число минимально. Но и тут какие-то избыточные связи есть на уровне контактов тормозных колодок с поршнями и со скобой суппорта.
Тема интересная и заслуживает серьезного научного анализа с выходом на четко обоснованные рекомендации для производства. Кому это интересно, можно посоветовать покопаться в серьезной литературе. Возможно, такой анализ уже кем-то сделан. Если нет – хорошая тема для диссертации.17.09.2019 в 11:17 #4200Вот сразу видно, что мы с вами из совершенно разных поколений. Вы сразу говорите про научное исследование и диссертацию, про рекомендации для производства. А я сразу подумал, что если бы разобраться со всем этим делом, можно сделать статью на форум/блог и снять видео для «самопальщиков» под названием «Делаем правильные тормоза на основе секретной советской технологии удаления избыточных связей«, чтобы «зашло через народ».
22.11.2019 в 09:24 #4252Здравствуйте, уважаемые конструкторы и остальные. У меня имеется вопрос по данной теме. Лучше, конечно, сделать отдельную, но по скольку я тут не распоряжаюсь — напишу сюда, а хозяин сайта сам решит.
Во первых, хочу сказать большое спасибо автору за его статью о самоустанавливающихся механизмах. Я, не имея технического образования, тем не менее на бытовом уровне прекрасно понимаю что трехногий стол не шатается на любой поверхности, а четырехногий шатается почти всегда. И этого понимания достаточно чтобы понять особую важность описанного подхода во всех без исключения механизмах. И хоть я не имею соответствующего высшего образования, образ мышления у меня технический и со всякими механизмами я разбираться люблю, поэтому хотелось бы получше разобраться в этом нелегком образе мышления. Это действительно заставляет думать другими категориями, видеть в возникающих при работе проблемах не те причины, что принято (не неточное изготовление отдельных деталек заставляет клинить и разрушаться механизм, а неграмотная конструкция, вызывающая ненужные напряжения между частями механизма при его работе). И это здОрово!
Теперь непосредственно о проблеме, которая меня интересует. В принципе, ситуация аналогичная обсуждавшимся мостовым кранам, но с некоторой спецификой.
Я некоторое время назад связался с 3d печатью. Дело это интересное, но со своими ограничениями. К недавнему времени дозрел до сборки собственного принтера. И как по заказу в то же время прочитал основную статью этого сайта. В голове сразу возникло представление о наличии проблем в конструкции принтера. При сборке они полностью подтвердились. Но сам я рационализировать конструкцию не могу — это не такая уж тривиальная задача. Ведь это все таки по сути станок, а не просто тележка — нужно обеспечить и жесткость и точность перемещения.
Конструкция, как я уже говорил, подобна мостовому крану. Есть две параллельные направляющие с роликовыми каретками. Длина направляющих около 250мм. Установлены они на раму принтера из композитного материала (вырезан фрезой на ЧПУ — относительно точно, но, понятное дело, не с микронной точностью. Регулировка возможна только в пределах люфта крепежа (винты, крепящие рельсу на корпус). Этого достаточно для выставления рельс впараллель чтобы каретки не подклинивали. На каретки крепится поперечная балка, диной порядка 350мм — на 4 винта с каждой стороны. Балка фрезерованная из алюминиевого сплава. Она в первом приближении представляет собой швеллер обращенный полками вниз, а с верху на ней еще одна направляющая с такой же кареткой, на которую крепится рабочий инструмент.
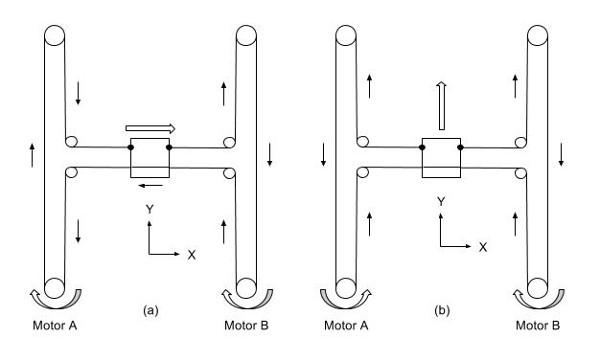
Привод всего этого ременный. Причем ремень закольцован через два шаговых двигателя и закреплен на каретке на поперечной балке. На этой же балке — по краям 4 направляющих ролика. На пальцах долго объяснять — это называется кинематика Н-бот. Вот на картинке можно посмотреть: https://3dtoday.ru/cache/870x/main/027/%D0%B0%D1%88%D0%B1%D0%BE%D1%82.jpg
Вопросы такие. Если попытаться сделать шарнирное соединение на одном из концов поперечной балки, то, во первых, как указывалось в статье, получим самоторможение, т.к. получается длинная балка сидит на короткой каретке и по приведенному описанию самоторможение обязано появиться. Во вторых, жесткость конструкции сильно пострадает — чисто из за изгибной деформации самой балки и в каретке, к которой она жестко крепится. Как же можно применить принцип самоустанавливаемости? При этом имеется еще и некоторое ограничение на выбор узлов, которыми это можно осуществить — туда не поставишь реактивные тяги с сайлент-блоками — в таком размере их нет, а изготавливать специально — нужен целый цех со станками, которого тоже нет. Есть готовые шаровые подшипники в продаже, но их качество под вопросом (пишут что у них у 50% люфт уже у новых, у остальных зазор или преднатяг неизвестной величины).
Лично я с ходу вижу один неверный момент, который можно легко устранить. Там, по крайней мере в продольных двух направляющих, не нужно было применять плоские рельсы — они ведь накладывают кроме прочего лишнюю связь по оси вращения, параллельной оси перемещения рельсы. Там нужно было круглый вал (или рельсу такую цилиндрическую) ставить. Но это не столь принципиально, т.к. даже микролюфта в каретках достаточно чтобы не было перекоса по этой оси. А вот что делать с непараллельностью (неточностью) рельс — не понятно. Движение их в данный момент хоть и без заеданий, но чувствуется что сопротивление меняется при движении поперечной балки. Как же можно изменить конструкцию для устранения этой неплавности? Сами каретки движутся более легко, хоть и не идеально.
И еще вопрос, родственный тем же мостовым кранам. Вы пишете, что конструкция всегда будет балансировать на двух колесах (при четырехколесной схеме). То же самое можно экстраполировать на мой случай — только там не колеса, а шарики и как вы писали ранее, при возникновении проблем параллельности нагрузка приходится в основном на крайние шарики. Так вот. А как же упругие деформации системы? Возвращаемся к одной из первых картинок основной статьи — там где показаны деформации каретки на двух валах, приводящие к заклиниванию и краевому трению. Там есть деформация, а в многометровой балке мостового крана нет? Вспомним работу торсиона (в подвеске танка к примеру). В данном случае балка крана сработает как торсион и на рельсы встанут все 4 колеса, но с разной нагрузкой, определяемой жесткостью балки крана на кручение. Следовательно можно вообще не делать никаких балансиров, а просто рассчитать балку так, чтобы в направлении основной нагрузки (при подъеме груза) балка имела максимальную жесткость, а на кручение имела достаточную гибкость, чтобы работали все колеса. Как вариант — вал балансира можно удлинить и жестко закрепить на обоих концах (на балке и на тележке, чтобы он работал как торсион), а в месте выхода из балки — на роликовом подшипнике (или вообще во втулке скольжения). Я имею в виду конструкцию где в пару (на балансире) объединены не колеса на разных рельсах, а те что стоят на одном рельсе. Ну, я конечно не разбираюсь в кранах, но применительно к моему вопросу, балка (сама или в месте с одной из двух кареток) имеет гибкость много большую чем возможные неточности в рельсе второй каретки. Думаю именно это и устраняет (вернее смягчает) лишние связи, что и позволяет конструкции работать в принципе. Т.е. если взглянуть на конструкцию сбоку (в торец поперечной балки), можно себе представить что на некотором участке имеется непараллельность рельс, так что они будут пересекаться друг с другом (в проекции) как X (во много раз увеличено). Т.е. в балке возникает кручение. Т.к. длина балки велика, а угол непараллельности крайне мал, то это практически не влияет на перемещение механизма.
Другой вопрос — непараллельность в горизонтальной плоскость (в плоскости проходящий через все 3 рельса) — В этой плоскости получается что где-то на большом удалении рельсы сходятся в одну точку (либо наоборот, расходятся). С этой проблемой можно бороться вертикальным рычагом на двух шаровых, как на примере в основной статье. Но, как я писал выше, возникает проблема жесткости и самоторможения, значит использовать этот прием нельзя. А что же можно сделать?-
Этот ответ был изменен 4 года/лет, 5 мес. назад от
Fenyx.
22.11.2019 в 09:52 #4254На всякий случай загружу картинку кинематики чтобы не потерялась.
Вложения:
You must be logged in to view attached files.22.11.2019 в 11:21 #4256Как же можно изменить конструкцию для устранения этой неплавности?
Чтобы посоветовать что-то конкретное, нужно видеть реальную конструкцию направляющих вашего принтера — какие именно рельсы и какие каретки. Если нет чертежей, выложите фото. Уверен, что решение найдется.
А по поводу мостовых кранов, я бы советовал не торопиться с высказываниями, если Вы с этими кранами дела не имели. Внимательно перечитайте статью и соответствующие сообщения на форуме. Многое для Вас прояснится. А пока скажу только, что никакие «упругие деформации» балок моста или торсионов, вызванные статической неопределимостью, не бывают «бесплатными». Плата за такие деформации — появление усталостных трещин в сварных соединениях и т. п. Кроме того, на совершенно реальных грузовых тележках реальных кранов невооруженным глазом видно, что зачастую имеет место балансирование на двух колесах из четырех (по диагонали четырехколесного опорного контура). Это же не мое предположение, а реальная ситуация. То есть лишние упругие деформации (сами по себе нежелательные) проблему попросту не решают.-
Этот ответ был изменен 4 года/лет, 5 мес. назад от
Д.Д..
24.11.2019 в 13:08 #4258Ну, на счет кранов — это были рассуждения, просто потому что у меня похожая конструкция и я могу буквально руками проверить её жесткость. Даже когда балка соединена с обеими каретками, если одну из них затормозить рукой, а вторую пытаться сдвинуть — получается качать его вдоль направляющей с амлитудой в пару миллиметров. То что в некоторых ситуациях реальные краны встают на два колеса говорит только о том что у них чрезмерная жесткость на кручение. Я же предлагал как вариант встроить специальный упругий элемент, работающий на кручение. Просто для рассмотрения. Но не суть.
Картинку могу приложить. В принципе выше есть схема положения ремня — направляющие параллельны ремню стоят. Направляющие с каретками mgn9h — распространенная конструкция.Вложения:
You must be logged in to view attached files.24.11.2019 в 14:20 #4260То что в некоторых ситуациях реальные краны встают на два колеса говорит только о том что у них чрезмерная жесткость на кручение. Я же предлагал как вариант встроить специальный упругий элемент, работающий на кручение. Просто для рассмотрения. Но не суть.
Снова невнимательное прочтение того, о чем высказываетесь. Не встают краны на два колеса. На них встает грузовая тележка крана и жесткость на кручение балок моста тут ни при чем. Грузовая тележка это относительно небольшая, но жесткая четырехколесная каретка с грузовой лебедкой, которая катается по двум пролетным балкам моста. Если Вы предлагаете встроить торсионы в конструкцию грузовой тележки, то получается тележка с упругой подвеской колес, а это совершенно меняет дело. Тогда действительно тележка будет всегда опираться на 4 колеса, только с неравномерным распределением нагрузки по колесам. Но торсионная подвеска колес (как и рессорная или пружинная) никак не проще и не дешевле введения простого балансира. При этом балансир обеспечит равномерное распределение нагрузки.
По поводу вашего принтера. Скорее всего, самоторможения здесь не будет. Ведь речь идет о трении качения шариков из закаленной стали по закаленной стали. Это можно достаточно просто проверить. Снимите ремень и отсоедините одну из кареток от балки. Попробуйте двигать балку вдоль рельсов держа ее за отсоединенный от каретки конец. Это самый неблагоприятный случай для появления самоторможения. Если его не будет, то при нормальной работе с установленным на место ремнем, самоторможения тем более не будет, так как в этом случае движущая сила будет приложена примерно на половине пролета. Если самоторможение все-таки будет, подскажу выход из положения.
А пока подумайте, какие шарниры нужно ввести для обеспечения самоустанавливаемости двух кареток на двух рельсах. Конструкцию конкретных шарниров можно подобрать в сети по ключевым словам «шарнирные наконечники». Вывалится масса картинок с такими изделиями, в том числе и малоразмерными (с резьбовыми креплениями порядка М6). Скорее всего, найдутся наконечники беззазорные и пылезащищенные. Если не найдете, подскажу как и из чего их сделать или скомбинировать.24.11.2019 в 19:23 #4261Я купил вот такие шаровые наконечники — самые простые и довольно дешёвые, под резьбу М5: https://ru.aliexpress.com/item/32300594276.html
У этого же продавца есть подобные наконечники других размеров и вообще много всякого добра, которое может пригодиться. Учитывая то, что в 3D-принтере не нужно «ловить сотки» (то есть не нужна точность до сотых долей миллиметра), беззазорные наконечники совершенно излишни. Точно также излишни пылезащитные наконечники, так как стружки и опилок при работе 3D-принтера нет.
24.11.2019 в 19:36 #4262Учитывая то, что кинематика принтера «H-bot» основана на ременном приводе, то точность тут малая изначально. Спокойно используйте стандартные шаровые наконечники и не парьтесь, будет только лучше (трение будет меньше).
Если бы у вас был принтер с кинематикой на шарико-винтовых парах, там ещё можно было бы повыпендриваться с беззазорными конструкциями, а с ремнями обычных шарниров хватит за глаза.-
Этот ответ был изменен 4 года/лет, 5 мес. назад от
Kobold.
24.11.2019 в 20:32 #4264а с ремнями обычных шарниров хватит за глаза.
На глаз и на вскидку мне не надо — надо точно известный допуск, а там можно решить допустимый он или нет. А китайцы допусков не дают. Одно дело натяжение ремня -именно за счет него зазоры и выбираются, другое — неизвестная величина зазора в китайских шаровых. Из таких наконечников делают дельта принтеры, так вот там этот люфт не дает получить нормальное качество печати — вот они и меняют эти детали регулярно. Мне этого не нужно. К тому же вопрос в том какую конструкцию собрать из этих (или других) шаровых. Самоторможение…
25.11.2019 в 06:12 #4265Странно, вам же Д.Д. написал всё чётко про самоторможение, как его проверить и что оно там маловероятно.
Про точность 3D-принтеров можете мне даже не рассказывать, её там не было и нет, особенно со станиной из фанерки лазерного раскроя. В крайнем случае потратите лишних 300 рублей на простые наконечники, которые потом заменитель на безззорные.
Прочитайте ещё раз, что вам Д.Д. написал про самоторможение. У него опыта конструкторской работы больше, чем я на свете живу, а мне уже сороковник. Так что можете спокойно этому доверять.
25.11.2019 в 07:45 #4266Из таких наконечников делают дельта принтеры, так вот там этот люфт не дает получить нормальное качество печати — вот они и меняют эти детали регулярно. Мне этого не нужно. К тому же вопрос в том какую конструкцию собрать из этих (или других) шаровых. Самоторможение…
Дайте, пожалуйста, ссылку на картинку, где было бы видно как именно «из таких наконечников делают дельта принтеры». И как, все-таки, у Вас обстоит дело с самоторможением?
А «какую конструкцию собрать из этих (или других) шаровых» вскоре покажу. Нужно нарисовать картинку, что и сделаю, как только выкрою для этого время.25.11.2019 в 09:34 #4267Если позволите, я приведу картинку (во вложении). На самом деле в дельта-ботах применяются разные шарниры. И вот такие китайские наконечники, и магнитные шаровые шарниры без зазора (якобы), и карданные шарниры.
Вложения:
You must be logged in to view attached files.25.11.2019 в 10:30 #4269На самом деле в дельта-ботах применяются разные шарниры. И вот такие китайские наконечники…
Странно все на этой картинке. Если правильно понимаю, для трех пар поводков важно, чтобы они, хотя бы попарно, имели строго одинаковую длину. Однако здесь на наконечниках не видно контргаек, нужных для регулировки и фиксации определенной длины поводка. Даже если бы эти контргайки были, возможная ошибка длины, кажется, может достигать 0,25 шага резьбы. А если просто наворачивать наконечники на поводок до упора, похоже, эта ошибка может доходить до 0,5 шага.
-
Этот ответ был изменен 4 года/лет, 5 мес. назад от
-
АвторСообщения
{kind=link}
Для ответа в этой теме необходимо авторизоваться.